|
名古屋市内においてバス車両を使用して行われた,自動運転の実証実験等を紹介します.
 名古屋市内&バス車両による自動運転の実証実験・定期運行など 名古屋市内&バス車両による自動運転の実証実験・定期運行など |
 |
愛知県では,毎年度,自動運転の実証実験を行っています.
名古屋市内では,平成27年〜29年にかけて,守山区のバスレーン(イオン守山→小幡緑地)において,自動運転の一般道走行試験(車両はプリウス)が行われました.
平成30年には中区官庁街でも走行試験(車両はエスティマ)が行われています.
バス型車両を用いた試験では,平成31年に尾張旭市(車両はポンチョ)にて,令和2年に日間賀島(車両はリエッセ2),空港島(車両はポンチョ)にて実施されています.
令和3年度以降の実証実験のうち,名古屋市内にて実施されたものは次の通りです.
|
令和3年(2021年) 都心における自動運転を利用した移動 |
|
|
令和3年度は,交通事業者等による実運行を想定した実証実験が行われました.
| モデル類型 |
ショーケース |
集客施設 |
都心 |
| 実証地域 |
中部国際空港 |
モリコロパーク |
名古屋市鶴舞周辺 |
| テーマ |
公道と空港制限エリアの同時運行・管理 |
駅から園内目的地へのシームレスな移動 |
都心における自動運転を利用した移動 |
| 幹事社 |
NTTドコモ |
NTTドコモ |
WILLER |
| 実証車両 |
小型バス(ポンチョ) |
JPN Taxi
ゴルフカート |
小型バス(アルマ) |
この実証実験の一環として,名古屋市鶴舞周辺において「都心における自動運転を利用した移動」をテーマに,自動運転車両の運行が行われました.
運行事業者は,WILLERグループと名鉄バスです.
【実証実験の概要】
実施日程/8月18日(水)〜10月29日(金)
昼間運行/10時〜17時(水・木・金曜日)
夜間運行/20時〜22時(10月の7日間)
走行経路/イオンタウン千種発着(鶴舞駅ルート,名工大ルート)
【事業実施体制】
WILLER(株)/幹事社,サービスの企画,システム・車両提供
名鉄バス(株)/サービスの企画,運行計画の策定・運行
WILLER EXPRESS(株)/運行計画の策定・運行サポート
ST Engineering/自動運転システムの技術面サポート
BOLDLY(株)/3Dマップ作成,車両設定,操作者トレーニング
名古屋工業大学/共同研究
イオンタウン(株)/将来的なサービスモデルの検討
今回の実証実験で提供されるモビリティサービスには「Nanamobi(ナナモビ)」という愛称が付けられています.
モビリティが新たな愛知を導くという想いと,「ナナちゃん人形」,名古屋弁で「ですね」を意味する「なも」を掛け合わせたネーミングです.

▲2021年走行ルート図 |

▲走行ルート上の案内看板 |

▲イオンタウン千種のりば |

▲同左 |

▲幹線道路も走行しデータを蓄積 |

▲JR鶴舞駅北口のりば |

▲JR高架橋横を走る |

▲右折する自動運転バス |
自動運転車両は,フランスNAVYA社製「ARMA」です.
自動走行に必要な測位システム,センサー等を搭載したバスタイプの完全電気自動車です.
(最高速度19km/h/全長4.77m/全幅2.1m/全高2.61m/車両重量2.49t/車両総重量3.26t)
定員は14名(オペーレーター等含む)で,本実証では立席運用せず,8名座席定員で運用されました.
車両デザインは,三英傑をイメージした兜の立物,名鉄パノラマカーやバスを想起させるラインが入っています.
自動運転前の準備として,運行ルートに沿ったスキャニングデータから,運行に必要な3Dマップの生成が必要です.
自動運転では,運行の基準となる3DマップをRTK GNSSで数cm単位で車両位置を推定するとともに,周囲360度を監視する3D LiDARと路面24cm以上の高さの動きを検知する2D LiDARの2種類のセンサーで障害物検知を行います.
これら収集したデータを元に道路上の歩行者や他車両等の障害物との相互影響を判断し,安全と判断した場合,駆動装置が起動して自動走行します.
本実証では,直進,加減速(前車両追従走行),停止,交差点右左折,バス停幅寄せはシステムにより自動で走行しました.
安全のため,セーフティーオペレーター(運転者)と保安員が同乗していました.
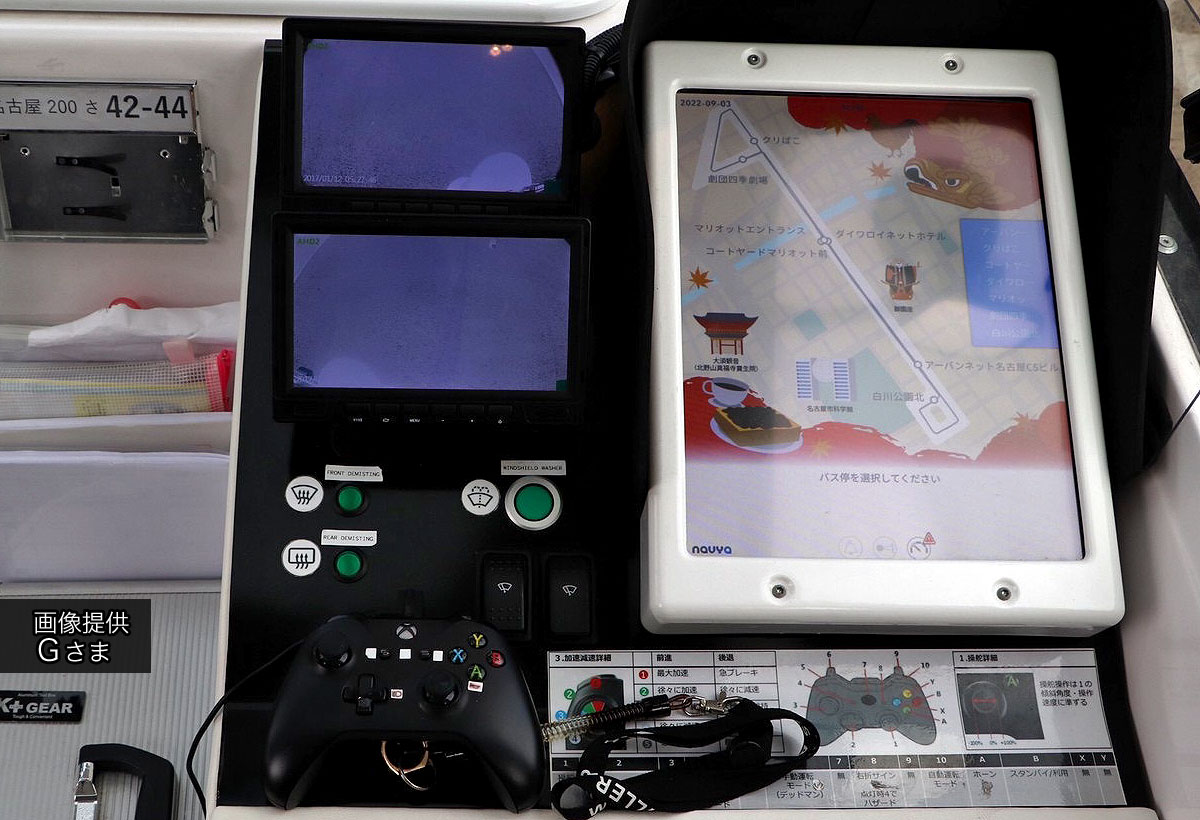
車内にアクセルペダルやハンドルは無く,セーフティーオペレーターはゲーム機のコントローラーを使って運転操作を行います.
本実証では,路上駐車車両を避ける際に,操作介入(自動運転から一時的に手動運転に切り替え)を行なっていました.
障害物検知(歩行者等検知)により自動で停止しますが,安全対策として即時停止するためにブレーキは強めです.

▲車両はナビア社製「アルマ」 |

▲名鉄バスカラーと三英傑(兜)をデザイン |

▲車内の様子(前方) |

▲オペ席(運転席)の様子 ハンドルは無い
手動介入する際は,コントローラーで運転操作を行う |

▲車内の様子(天井/前方) |

▲車内の様子(後方) 客席は8席あり |
自動運転バス nanamobi ナビヤ社アルマ
令和4年度は,交通事業者等が実運行において再現可能かつ持続可能なビジネスモデルの構築を目指した実証実験が行われています.
愛知県内では3地域において実施されます.
| モデル類型 |
ショーケース |
集客施設 |
都心 |
| 実証地域 |
中部国際空港
・常滑市街 |
モリコロパーク |
名古屋市
名駅南〜栄南地区 |
| テーマ |
磁気マーカシステム
ビッグデータ活用 |
園内バスルート |
イノベーション創出 |
| 幹事社 |
NTTドコモ |
NTTドコモ |
WILLER |
| 実証車両 |
小型バス(ポンチョ)
大型バス(レインボー) |
大型バス(レインボー) |
小型バス(アルマ) |
都心型の実証実験として,9月に「イノベーション創出に向けた自動運転車の活用」をテーマに,名駅南〜栄南地区を東西に結ぶ三蔵通を中心とした経路で,自動運転車が運行します.
運行事業者は,WILLERグループと名鉄バスです.
【実証実験の概要】
実施日程/9月1日(木)〜9月30日(金)の火・水・木・金曜(祝日除く)
ビジネス活用検証を目的としているため一般向け試乗はなし
【事業実施体制】
WILLER(株)/幹事社,サービスの企画,システム・車両提供
WILLER EXPRESS(株)/運行計画支援,トレーニング支援
名鉄バス(株)/運行計画の策定・運行,遠隔モニタリング
ST Engineering/自動運転システムの技術面サポート
BOLDLY(株)/3Dマップ作成,自動走行設定,操作者トレーニング
名古屋工業大学/共同研究
STATION Ai(株)/付加価値創造における検証
AGC(株)/窓ガラス映像投影に係る技術面サポート
将来的には,名古屋駅とSTATION Ai(鶴舞)を自動運転車で結ぶモビリティサービスへつなげることを目指しています.
令和4年のルートは,利用者の都心への立ち寄りの利便性や,都心の中では比較的交通量が少なく自動運転の実証に適していることから三蔵通が選ばれました.
またビジネス活用検証として,車内で映像投影する「動く会議室」としての付加価値の検証や,アプリを用いたオンデマンド運行も検証されます.

▲車両は昨年度同様にナビア社「アルマ」 |

▲オペ席 R4年度コースが設定されている
(画像提供:G様) |
自動運転バス nanamobi ナビヤ社アルマ
|
令和5年(2023年) 自動運転車(セダン型)の実証実験 |
|
|
令和5年度も引き続き,自動運転の社会実装を見据えた実証実験が行われました.
| モデル類型 |
ショーケース |
集客施設 |
都心 |
| 実証地域 |
イオンモール常滑〜中部国際空港(公道) |
モリコロパーク(閉鎖空間) |
名古屋駅付近〜イオンタウン千種(公道) |
| テーマ |
一般客向けの定期運行 |
将来の無人自動走行に向けた検証 |
都心の道路環境に対応したスムーズな自動走行 |
| 幹事社 |
NTT Com |
NTT Com |
WILLER |
| 実証車両 |
小型バス(ポンチョ) |
小型EVバス(GSM8) |
セダン型車両 |
都心型の実証実験として,12月〜2月に「都心の道路環境に対応したスムーズな自動走行」をテーマに,名古屋駅前からイオンタウン千種までの若宮大通を舞台に,検証が行われました.
参加企業は,WILLERグループとモービルアイ,名鉄バスです.
車両はモービルアイ社実験車両(セダン型)です.バス車両ではありません.
【実証実験の概要】
実施日程/令和5年12月12日(火)〜12月22日(金)の平日
【事業実施体制】
WILLER(株)/幹事社,将来的なサービスモデルの検討
(株)モービルアイジャパン/自動運転車両提供,走行調律作業の実施,セーフティドライバー
名鉄バス(株)/地域事業者としての実証支援
イオンタウン(株)/地域事業者としての実証支援
名古屋工業大学/実証支援および実装へのアドバイス
最高速度は60km/hで,交通量の多い市内幹線道路を周囲の車速に対応したレベル2(ハンズオフ)自動走行ができることを検証しました.
|
令和6〜7年(2024〜25年) 自動運転車(ミニバン型)の定期運行 |
|
|
名古屋市内においては,令和6年度からは,先端モビリティによる定期運行が始まりました.
(別途実証実験として,引き続き中部国際空港周辺におけるコミュニティバスをイメージした自動運転サービスの検証や中型バス車両による高速道路の走行検証,モリコロパークにおける歩車共存の検証も行われています.)
令和6年度からは,ロボットタクシー(大規模かつ複雑な交通環境で走行可能な無人自動運転タクシー)の実用化に向けた課題の抽出及び対応策の検証をテーマに,STATION Ai(昭和区)と名古屋駅(スパイラルタワーズ)を結ぶ若宮大通を中心としたルートで自動運転による定期運行が行われました.
令和7年度は,エリアと規模を拡大して運行されています.
タクシー想定のため,バス車両ではありません.
車両はトヨタ製シエナ(ミニバン)をベースとした車両で,May Mobility社の自動運転システム(セーフティドライバー付きレベル2自動運転)を搭載しています.米ジョージア州で実際に自動運転タクシーとして使われているものと同等の車両です.
車体には,HAL名古屋の学生がデザインしたラッピングが施工されました.
【事業概要】
事業概要/交通量の多い名古屋市中心部での先端モビリティによる定期運行
利用方法/予約サイトからの事前予約制,運賃無料
<令和6年度>
運行経路/スパイラルタワーズ(名駅)〜STATION Ai(鶴舞)
実施日程/令和6年11月7日(木)〜翌年3月19日(水)
運行頻度/1台使用,平日4〜5往復/日,乗客定員4名/便
<令和7年度>
運行経路/スパイラルタワーズ(名駅)〜愛知芸術文化センター(栄)〜STATION Ai(鶴舞)
実施日程/令和7年10月14日(火)〜翌年3月19日(木)
運行頻度/2台使用,平日9便/日(周回ルート),乗客定員5名/便
(10月28日に物損事故が発生し,ダイヤ等が変更されています.)
【事業実施体制】
(株)NTTドコモ/事業統括,車両調達等
May Mobility(同)/自動運転車両・システム提供,遠隔管制システム提供
名鉄バス(株)/交通事業者としての運行支援
東京海上HD(株)/損害保険の提供,事故対応の検証
日本教育財団/地域事業者としての実証支援,車両デザイン,PR動画作成
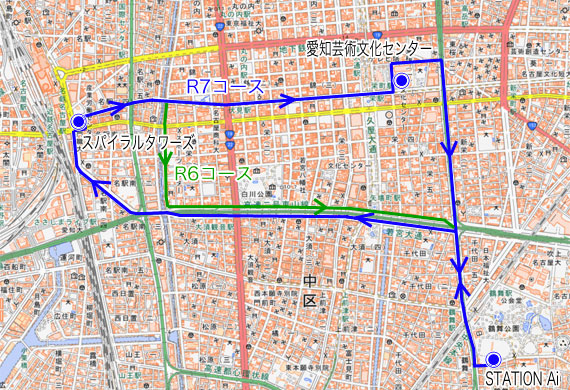
▲R6・R7運行経路図 |

▲ロボットタクシー(トヨタ シエナ) |

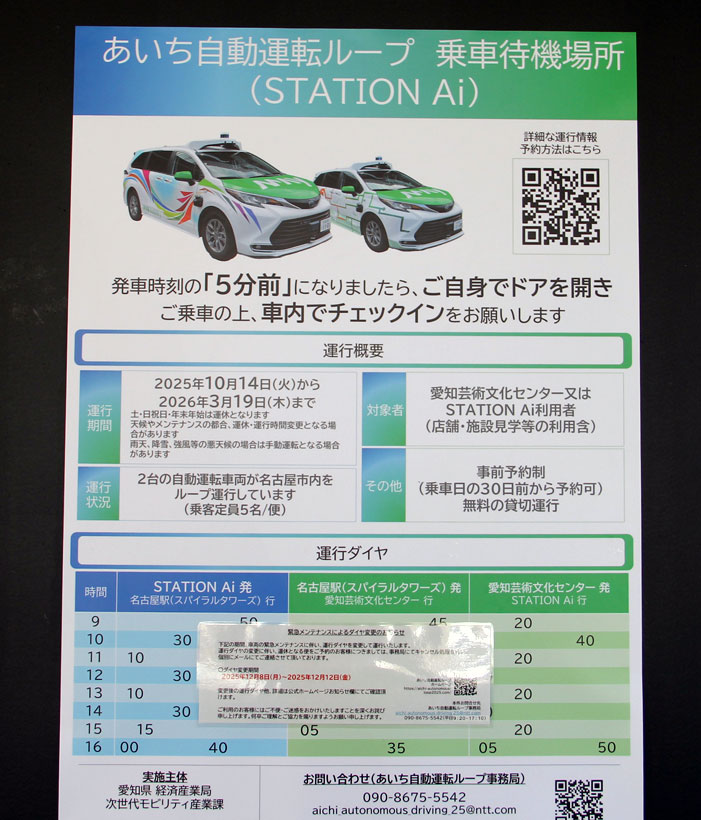
▲乗車待機場所の案内 |
|
| その他 次世代モビリティ |
|
愛知県では,令和7年度より,トヨタ自動車が開発した「e-Palette」を全国の自治体に先駆けて導入し,STATION Aiを起点とした定期運行を開始しています.
▼もどる
|