| トップページ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ガイドウェイバスの現システムが抱える短期的な課題は 名古屋ガイドウェイバス「ゆとりーとライン」は,定時性・速達性・輸送力・信頼性・安全性を高いレベルで実現し,名古屋市北東部の基幹的公共交通として20年間機能してきた実績があります. 一方で,名古屋市以外への導入事例はなく,システムの継続が困難な状況となっています. はじめに,ガイドウェイバスの現システムが抱える根本的な課題を3点挙げます.
(1)開発コスト 現在のガイドウェイバスシステムは,我が国では昭和60年から研究開発が進められました. 本来,このような新しいシステムは,国内外で採用事例が増えて普及が進むことで,システムの改良やシステム調達価格の低下が期待されるところです. 特に市販の路線バス車両をベースとしている専用車両については,12年〜18年で車両の更新周期が来るため,その都度多額の資金を投じて車両開発を行う必要があります. また,「ガラパゴス」ゆえ,完全オーダーメイド車両となるため,車両更新(大量調達)以外での少数&随時調達が難しく,近年の利用者増加に伴う朝夕の混雑緩和が喫緊の課題となっているにも関わらず,簡単に輸送力増強ができないといった課題もあります.
(2)軌道法対応コスト 現在のガイドウェイバスシステムの専用走行空間(専用軌道)は,わが国では軌道法が適用されます. このため,車両は路線バス機能に加え軌道車両としての機能が付加されます. 施設も軌道法に対応した設備が必要で,有人監視や専用機器追加で初期投資も維持管理費も膨大なコストがかかっています.
(3)バリアフリー対応不可 公共施設のバリアフリー化が叫ばれて久しく,乗合バス車両も「ノンステップバス」が当たり前の時代となりました.
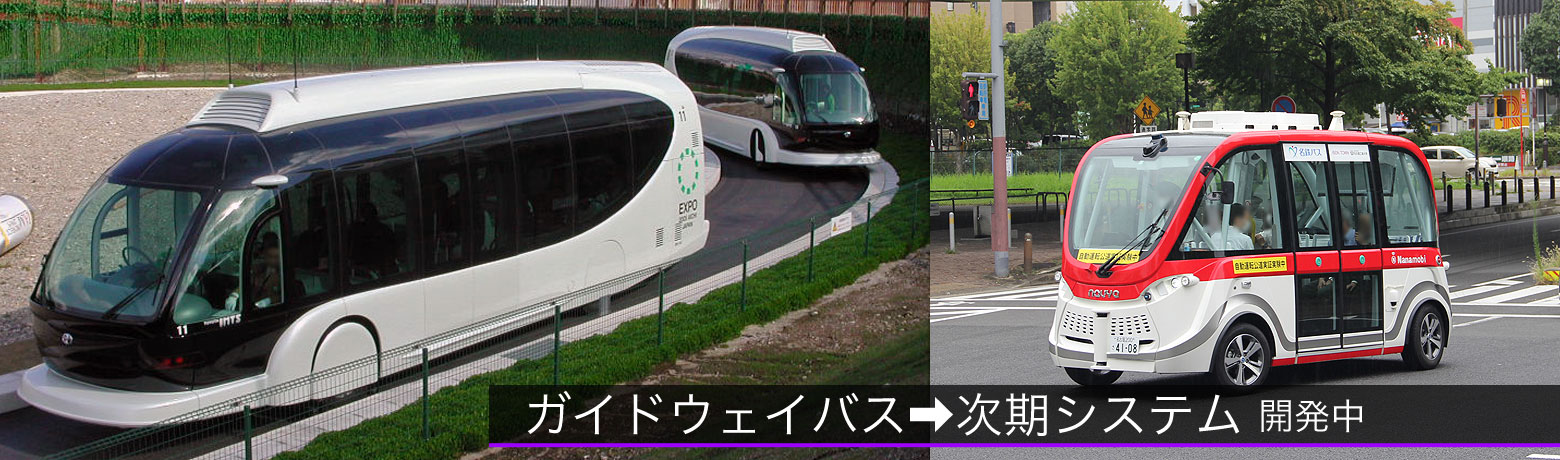
次の大規模な設備投資=ガイドウェイバス車両の更新時期は,2026年度頃です.(※当初予定) この機を捉え,名古屋市では,現在のガイドウェイバスが達成している公共交通としての機能(定時性・速達性・輸送力・信頼性・安全性)並びに高架専用道空間と一般道空間の両方を走行できる現システムの長所は生かしつつ,低コストで持続可能なシステムへアップデートすることを目標に,令和8年度(2026年度)(※当初予定)に現行のガイドウェイバスシステムから自動運転システムを活用した新しい交通システムに転換することを目指し,検討が進められているところです. 
しかしながら,2022年時点においては自動運転システムを実装した車両を営業運転に使用している事例はまだないため,新しい交通システムに転換するために解決しなければならない検討項目は多岐に渡ります. このため,名古屋市では,車両更新周期を迎える2026年を当初目標に,
計画では,従来の「ガイドウェイバスシステム」ではない,「自動運転技術を活用した新しい方式」へ輸送システムを抜本的に更新することで,車両の汎用化と増車等による輸送力強化および柔軟な運用,バリアフリー化,省力化によるコスト縮減,これらによるサービス向上を図る方針です. さらに将来的には,高架区間(BRT専用道路空間)において,さらに高度な自動運転技術の実装を目指す方針です.
自動運転バス車両開発(2026年当初目標)の前提条件と基本方針は次の通りです. (1)バスには,大型二種免許を有する運転者が乗車し,運転責任は運転者が有する. (2)バス車両の諸元は,長さ11m以下,幅2.5m以下,高さ3.3m以下,車両総重量16t以下,定員70〜80名程度の立ち席を有する,ノンステップバス標準使用に適合した大型路線バスの使用を想定する. (3)動力(内燃機関又は電動)は,目標とする機能の実現性・運用のしやすさ・車両単価等を総合的に考慮して検討する. (4)バス専用道の幅員構成は,車線幅員3m(側方余裕0.2〜0.25m)とし,運転者の負担軽減のため,磁気誘導又は白線誘導等の誘導方式により連続的な横方向の運転支援機能を実装する. (5)バス専用道の制限速度(走行路の曲線半径に応じて設定)を超過しないよう,鉄道におけるATS-Pのように車両速度を連続的に照査し,抑制する機能を実装する. (6)鉄道におけるATO(自動列車運転装置)のように,事前に設定した運転曲線に従い,システムが連続的に速度をコントロール(自動加減速)する機能を実装する.
現在の高架専用道は,建設費を抑えるため,ガイドウェイで安全を担保することで,道路幅員自体は幅5.7mと狭く作られています. しかしながら,高架専用道の側壁には,システムエラーや強風で走行路を逸れて衝突した場合に落下を防ぐ強度はありません.
バス専用走行空間の前提条件と基本方針は次の通りです. (1)現行の高架専用軌道からBRT専用道に改築する. (2)BRT専用道の幅員構成は,車線幅員3mとし,車線の左側及び右側に側方余裕を0.2〜0.25m程度設定する. (3)運転者の負担を軽減するため,連続的な横方向及び縦方向の運転支援機能を実装する.走行路には,運転支援機能に必要な磁気マーカー・RFIDタグを整備する. (4)白線・磁気マーカー等,RFIDタグ,信号システム,車両位置等の情報を伝達する通信手段(専用通信線や携帯電話回線等)等の地上側施設について整理する. (5)BRT専用道への改築に伴い,走行路への適用法令を軌道法から道路法に変更する.現行の高架構造物は,道路構造令に適合しない部分があるため,国と法令解釈や制度設計の調整を行いながら,将来の条例化など特殊基準の策定を検討する.
その他の地上設備の前提条件と基本方針は次の通りです. (1)走行路上の車両位置の監視,車両状態の監視,緊急時の車両への情報伝達や指示を行うための信号システム,運行監視システム,それらと車両との通信経路(携帯電話回線利用)を整備する.
車両システム構成と運転制御の前提条件と基本方針は次の通りです. (1)路線バスの大型二種免許を有する運転者が乗務し,運転責任を有することを前提とする. (2)現行のガイドウェイバスの運転規程をもとに,基幹的公共交通として必要な機能,バス専用道との整合を考慮してODD(Operational Design Domain/運行設計領域/自動運転システムが作動する前提となる走行条件.車速・地形・道路・気象・交通状況・時間帯等など)を設定する. (3)今後,ハードウェア(センサー,アクチュエーター,ECU 等の主要なシステム構成)を整理検討する. (4)システムの安全性・信頼性の目標は,実績のある鉄軌道システムにおける自動運転とバス専用道を手動で運転する路線バスの間にあると想定する.
自動運転バスを運用(運転・運行管理・整備等)するための交通システム構築の前提条件と基本方針は次の通りです. (1)自動運転バスを活用するための交通システムの適用法を整理する. (2)運転・運行管理・車両整備を実施する事業者,車両・地上設備等の自動運転に係るハードウェア及び走行路など,交通システムを構成する要素を整理し,運用(運転・監視・点検・整備等)業務概要(役割と責任)を整理する.
ガイドウェイバスの次期システム車両に自動運転技術等が実装され,高架専用軌道のBRT専用道化(軌道法適用除外)が実現した場合,次のメリットが見込まれます.
(1)車両のメリット 自動運転技術により,正確な運転操作が実現した場合,ガイド装置が不要となります. 市販の標準的な大型路線バス車両に,自動運転装置と各種安全装置,センサー等を搭載するなど専用車両化改造は必要ですが,現在の専用車両を初めから開発する必要は無くなるため,車両の汎用化により車両調達コストが下がり,増車しやすくなります.
(2)施設のメリット 磁気マーカー等の運転支援施設は必要ですが,ガイドレールなど大掛かりなガイド装置が不要となります. 軌道法の適用除外となることで,有人監視や専用機器が不要となる等の省力化により,維持管理コストが下がります.
(3)運行面でのメリット 軌道法の適用除外となることで,専用運転免許の取得が不要となり,要員確保がしやすくなります. 車両が調達しやすくなることで,輸送力増強や柔軟な運用ができるようになります.
さらに将来,技術が進歩すれば・・・ 2026年時点では,運転者が補助的に乗車する「自動運転レベル2」からスタートする予定です. その後,高架区間(BRT専用道路空間)ではさらに高度な自動運転技術の実装を目指す方針となっており,自動運転技術が進歩すれば,無人運転や隊列走行による輸送力増強も行われる予定です.
自動運転技術を中心に,これまで検討が進められてきました. 
国土交通省では,自動車の自動運転の実現に向けた各種の実証実験・社会実証に取り組んでいます. 【背景】 【実証実験を行う意義】 【実証実験の概要】 ※国土交通省自動運転戦略本部第3回会合配布資料「自動運転の実現に向けた今後の国土交通省の取組(平成29年6月8日)」より
なお,余談ですが,名古屋ガイドウェイバス(ゆとりーとライン)関係では,平面区間のバス優先レーン(吉根仲田交差点から竜泉寺付近)において,平成26年度より名古屋大学らのグループによる実証実験(乗用車の自動運転)も行われていました.
2017年度(平成29年度)にはトヨタ自動車との連携協定が締結されました. 2018年度(平成30年度)は,自動運転の可能性について概略検討が行われたほか,ソフトバンクとトヨタ自動車の共同出資会社「MONET Technologies社」との連携も始まりました. 2019年度(令和元年度)は,ガイドウェイバス高架区間への自動運転技術の導入を想定した走行空間に係る検討が行われました. 2020年度(令和2年度)は,前年に引き続き自動運転技術の導入等の検討が行われました.
2021年度(令和3年度)からは,
「次期システム車両の検討」については,2022〜2024年度に要件整理が行われ,2025〜2027年度に基本設計が行われます. 2021年度(令和3年度)に引き続き,2022年度(令和4年度)から3年間,次の検討が行われました. 【2022〜2024年度検討項目/要求機能及び性能の整理】 詳細は
2022年度(令和4年度)は,自動運転バスの実験走行に向け,先行する他の実証実験のデータ検証が行われました(机上検討).
2023〜2024年度(令和5〜6年度)は,ガイドウェイバス志段味線の将来の走行空間を想定し,他の先行実験では検証できないバス専用道に存在する急カーブ部や狭い走行路における自動運転システムの運転精度等を検証するため,自動運転バスを使った実証実験が行われました. その1【大型バスを用いた位置精度検証の実証実験】 作成した地図の経路に対する,磁気マーカー誘導方式などによる車両の自己位置の精度検証が行われました.
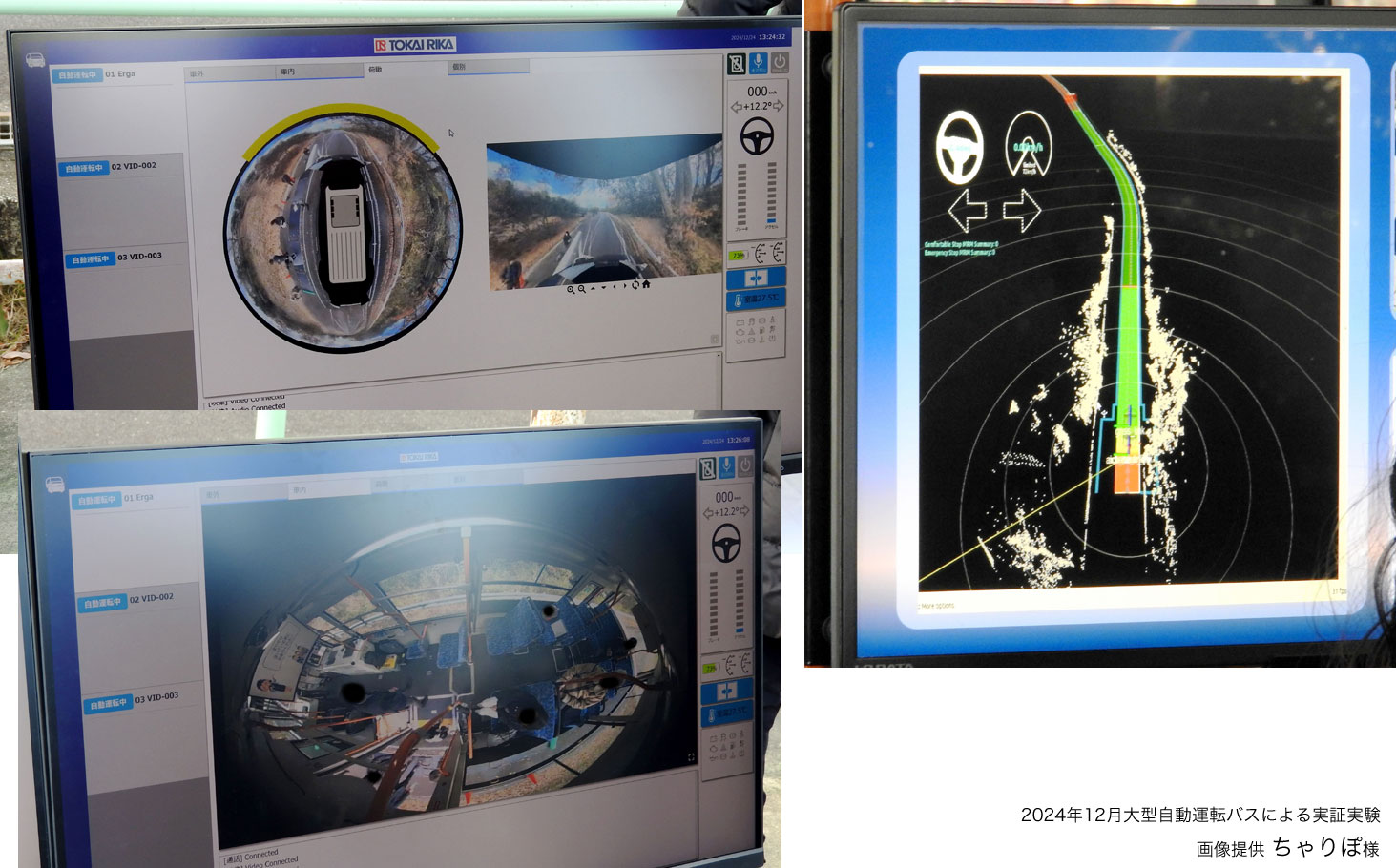
その2【大型自動運転バスによる高架区間想定路面走行実証実験】 実験区間においてガイドウェイバス専用道(高架区間)の幅員や急カーブを部分的に再現し,運転士が乗車した状態でハンドル操作や加減速操作をシステムにより自動走行(自動運転レベル2)し,自動運転用センサを使用した各種誘導方式(※1)による車両制御の精度検証が行われました. 本実験は,国土交通省「地域公共交通確保維持改善事業費補助金(自動運転実証調査事業)」の採択事業です. (※1)各種誘導方式
令和6年12月の実証実験ではモニター試乗も行われました.
その3【高架区間における走行実証実験】
このような磁気マーカー等のインフラ支援による自動運転バスの実証実験が繰り返され,次期システムの車両要件(基本仕様/下記参照)と今後の課題が整理されました. <これまでの実証実験を踏まえた課題の例>
【2025〜2027年度の検討/車両の基本設計】 2025年度(令和7年度)から3カ年かけて,次期システム車両の要件(横方向制御の機能と性能,安全性と輸送力・速達性の両立,信頼性,低コスト化,運用性と保守性,特に横風を受けた時の車両挙動などODD※深度化)を踏まえた車両の基本設計(具体的な機能・性能を整理)が行われます. ※ODD:自動運転システムが作動する前提となる走行条件 また,課題解決に向け,2025年度(令和7年度)に次期システム車両の高精度な横方向制御の技術検証に向けた計画(実験計画・実験車両設計・制御ソフトウエア設計等)が作成され,2026年度(令和8年度)以降に実験車両を製作し,走行路を模したテストコースで実車を使った実験を実施して,高精度な横方向制御の技術検証を完了させる予定です.
公募型企画競争の結果,受託者が過年度までのアイサンテクノロジーグループではなく,先進モビリティ(株)に変わりました.
「ガイドウェイバス高架構造物のバス専用道化検討」については,法令基準の変更も視野にあることから,2021年度(令和3年度)から2023年度(令和5年度)にかけて,学術団体である交通工学研究会に委託して,有識者を交えた検討が進められました. この取組は,2022年度(令和4年度)から5年間,現行の高架専用軌道からBRT専用道への改築設計・改築工事について,国の社会資本整備総合交付金(市街地整備事業)に採択されました.
2024年度(令和6年度)は,バス専用道(高架構造物)の改修設計基準等が作成され,道路構造令に準拠した線形が決定されました. 2025年度(令和7年度)は,過年度までに決定した線形についての座標計算(横断面図等の作成)が行われます.
従来のガイドウェイシステム(軌道法&専用軌道に基づく専用車両と管理体制)から,新しいシステムに変化することから,2024年度(令和6年度)より新しい輸送システム導入に向けた事業スキームの検討も始まりました. 2025〜2027年度(令和7〜9年度)にかけて,次期システムの基本設計が行われます. (1)システム全体像の具体化 2025年度(令和7年度)
これまでの検討を踏まえた,新たな課題や今後の見通しです.
平成25年度より導入をはじめた現在のガイドウェイバス専用車両について,経年12年となる令和8年度(2026年度)には廃車できるよう,当初計画では令和8年度の次期システム導入が想定されていました. 令和7年度から3カ年かけて基本設計が行われ,そこから車両製造に1年を要すると仮定すると,次期システム導入は早くて令和11年度(2029年度)以降になると推測されます. それまでの間,ガイドウェイバス専用車両の延命整備(経年12年→経年15年?)を図っていく必要があります.
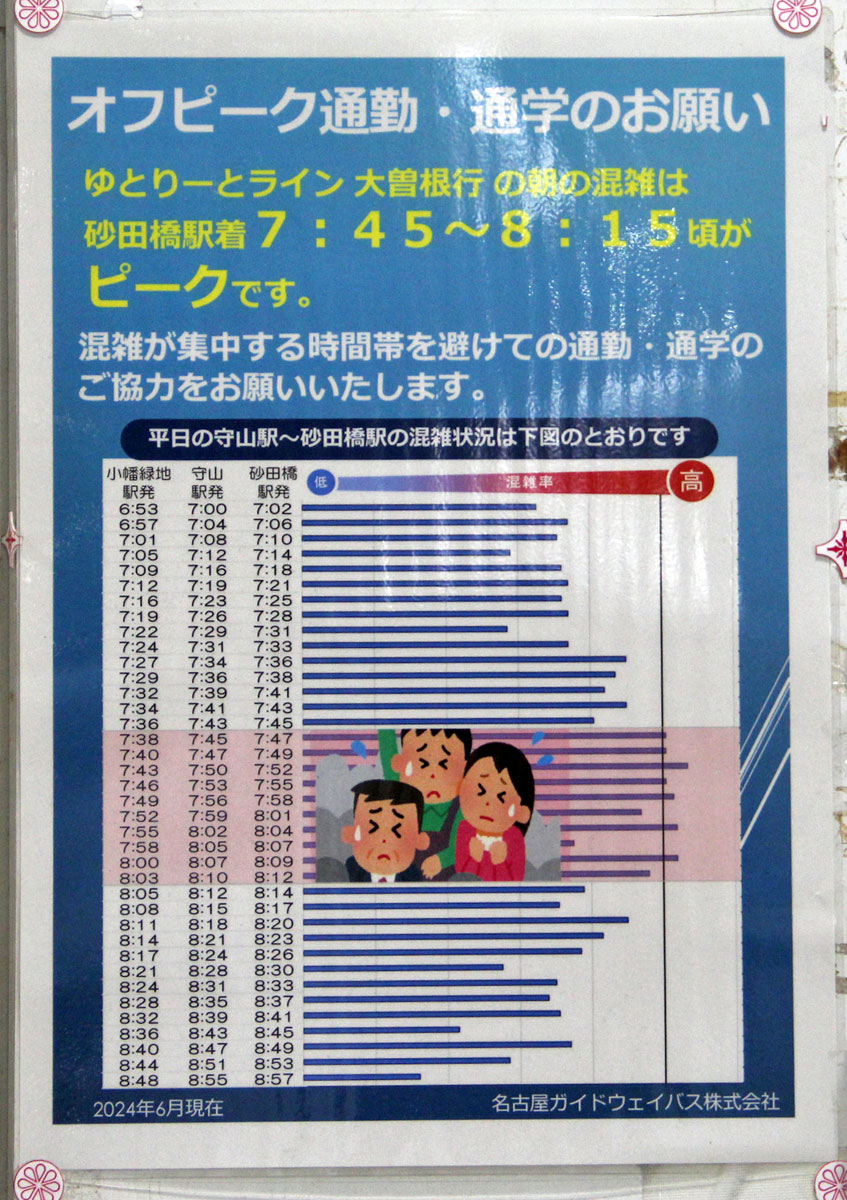
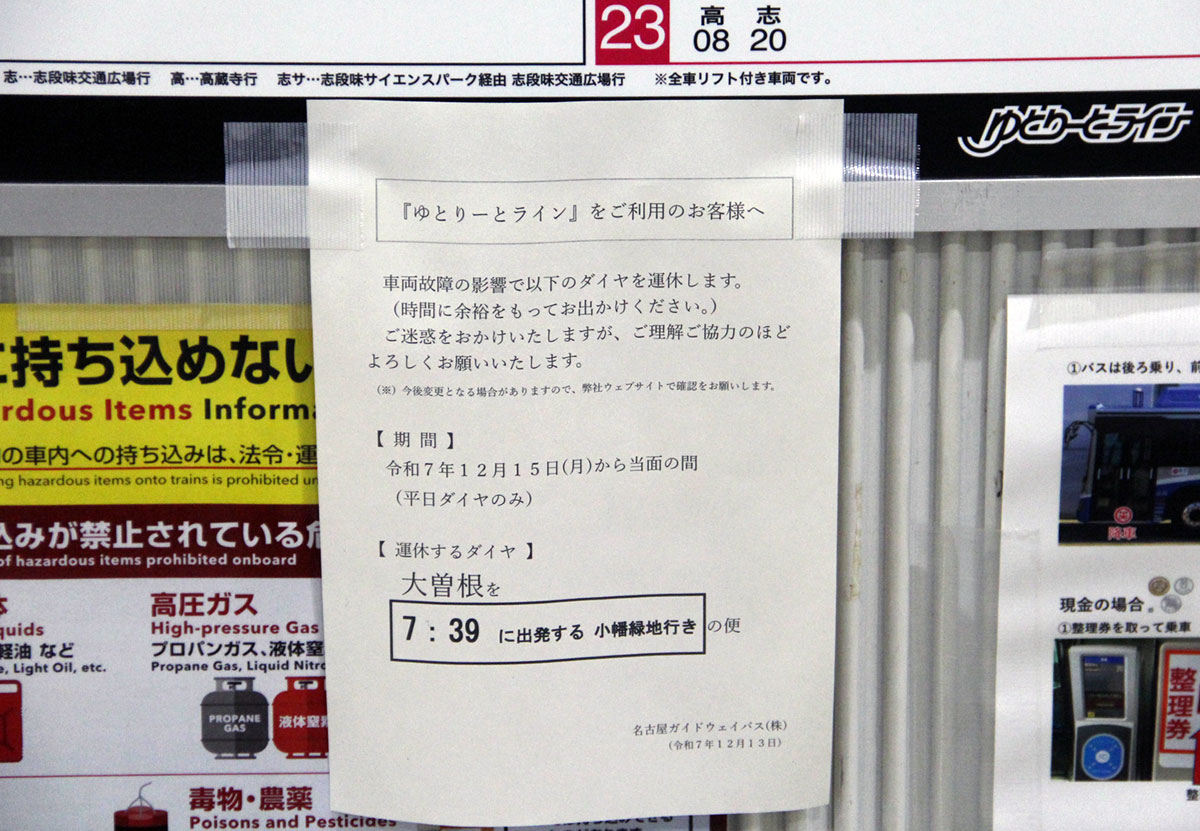
次期システム導入の遅れに伴い,旅客への影響も徐々に出始めています. (影響1)志段味地区人口増加に伴い,平日朝夕間ラッシュ時の混雑集中が喫緊の課題となっています. (影響2)車両の老朽化に伴い,故障による運用離脱が増えています. (影響3)既存車両の延命のため車両修繕・運用計画が見直され,令和8年3月ダイヤ改正にて平日朝時間帯の運行回数が減便(往復各4便減)となりました.
専用軌道のバス専用道路化(BRT専用道路化)にあたっては,磁気マーカー等敷設のほか,案内レール撤去や側壁の強化(取替え)など,一定期間,高架区間の改修工事を行う必要があります. 改修工事期間中の代替輸送が課題です.
以上,令和8年3月時点における情報をまとめました.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| (C) まるはち交通センター製作委員会GWB,GW | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||